5.3.1. Transformaciones lineales
Una transformación lineal es una regla que asigna a cada elemento de un conjunto exactamente un elemento de otro conjunto.
Una transformación T de Rn en Rm,que se denota como ![]() es una regla que asigna a cada vector u Rnun vector único v en Rm.
es una regla que asigna a cada vector u Rnun vector único v en Rm.
Rn recibe el nombre de dominio de T y Rm es el codominio. Se representa mediante ![]() ; v es la imagen de u bajo T. El conjunto de imágenes recibe el nombre de rango de T.
; v es la imagen de u bajo T. El conjunto de imágenes recibe el nombre de rango de T.
Por ejemplo, una transformación ![]() se puede determinar como
se puede determinar como
![]() . Donde el dominio de T es R3 y el codominio es R2. Donde la imagen del vector
. Donde el dominio de T es R3 y el codominio es R2. Donde la imagen del vector ![]() se puede determinar estableciendo
se puede determinar estableciendo ![]() . Entonces la imagen es
. Entonces la imagen es ![]() Se dice que una transformación
Se dice que una transformación ![]() es lineal si:
es lineal si:

 y el vector columna
y el vector columna  . Encuentra la transformación
. Encuentra la transformación ![]() de R3 en R2. Usando la transformación encuentra
de R3 en R2. Usando la transformación encuentra  .
.
Haciendo la multiplicación entre matrices:

Por lo tanto, las imágenes son:

Observa que la transformación de una suma de vectores es igual a la suma de sus transformaciones, mientras que la transformación del producto de un vector por un escalar es igual que el escalar por la transformación del vector.
5.3.2 Representación matricial, matrices y transformaciones lineales
En esta sección se verá cómo representar una transformación lineal en espacios vectoriales por medio de una matriz. Así, decimos que una transformación lineal T queda definida si su valor en cada vector del dominio se conoce.
Se representarán los elementos de U y V por medio de vectores de coordenadas, y T por medio de una matriz A que define una transformación de vectores de coordenadas.
Sean U y V espacios vectoriales con bases
![]() una transformación lineal. Si u es un vector en U con imagen T(u) con vectores de coordenadas a y b respecto de estas bases, entonces:
una transformación lineal. Si u es un vector en U con imagen T(u) con vectores de coordenadas a y b respecto de estas bases, entonces:
![]()
Donde
![]()
La matriz A define una transformación de los vectores de coordenadas de U de la misma forma que T transforma los vectores de U.
Ejemplo 1. Considera la transformación lineal ![]() definida por
definida por ![]() . Encuentra la matriz de T con respecto a las bases
. Encuentra la matriz de T con respecto a las bases ![]() de R3 y R2, donde:
de R3 y R2, donde:
![]()
Utiliza esta matriz para encontrar la imagen del vector ![]() Se determinan los efectos de T sobre los vectores de la base de R3.
Se determinan los efectos de T sobre los vectores de la base de R3.

Los vectores de coordenadas ![]() son
son  . Estos vectores forman las columnas de la matriz T.
. Estos vectores forman las columnas de la matriz T.
Se determina el vector de coordenadas u. Usando las combinaciones lineales de vectores:
![]()
Se encuentra que ![]() , siendo el vector de coordenadas u de
, siendo el vector de coordenadas u de  El vector de coordenadas
El vector de coordenadas
T(u) es

Por lo tanto, ![]() Se puede verificar este resultado con la ayuda de la definición
Se puede verificar este resultado con la ayuda de la definición ![]() . En el caso de
. En el caso de ![]() , da
, da
![]()
5.3.3 Aplicaciones: Rotación respecto del origen
Considera una rotación ![]() respecto del origen. Sea:
respecto del origen. Sea:
![]()
El paralelogramo 1 se transforma en el paralelogramo 2, puesto que la diagonal del paralelogramo 1 se transforma en la diagonal del paralelogramo 2, como se muestra en la siguiente figura.


Considera una rotación en sentido contrario a las manecillas del reloj en un ángulo ![]() respecto del origen. Esta rotación transformará el punto A en el punto B, como se muestra en la siguiente figura.
respecto del origen. Esta rotación transformará el punto A en el punto B, como se muestra en la siguiente figura.
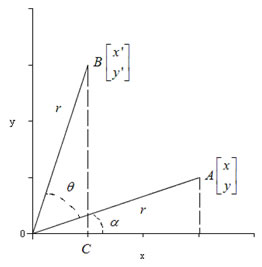
La distancia OA es igual a OB, se denota esta distancia como r. Siendo el ángulo AOC, se tiene que:

Colocando estas expresiones en una sola ecuación matricial:

Por consiguiente:

Una rotación respecto del origen se encuentra definida por una multiplicación entre matrices, confirmando que una rotación es un operador lineal. Si θ es positivo, la rotación es en sentido contrario a las manecillas del reloj; la rotación es a favor de las manecillas del reloj si θ es negativo.
Ejemplo 1. Determina la imagen del punto ![]() bajo una rotación de
bajo una rotación de ![]() radianes respecto del origen.
radianes respecto del origen.
Se obtiene ![]() en la matriz de rotación:
en la matriz de rotación:

Observa la gráfica:

![]()